简介
libev 是一个基于Reactor模式的高性能事件循环网络库。它和libevent很像,按照作者的介绍,可以作为libevent的替代者,能够提供更高的性能,而且代码比较精简。主页是http://software.schmorp.de/pkg/libev.html。
在阅读代码之前,先熟悉一些libev中用到的“编程技巧”。
与Reactor模式的关系
通常来说,Reactor由5个角色组成:
- Handle:即操作系统中的句柄,是操作系统对资源的一种抽象,可以是打开的文件、一个连接(Socket)、Timer等。
- Synchronous Event Demultiplexer:同步事件多路复用器,实际上通常是系统调用。比如linux中的select、poll、epoll等。它会同时监控多个句柄,等待事件的到来。
- Initiation Dispatcher:事件分发器,它提供了注册、删除与调用event handler的方法。当Synchronous Event Demultiplexer检测到handle上有事件发生时,便会通知initiation dispatcher进行事件转发。
- Event Handler:事件处理抽象类,提供一个通用接口handle_event。
- Concrete Event Handler:具体的事件处理器,继承自Event Handler,会实现具体的事件处理逻辑。
在libev中,struct ev_loop是框架的事件循环核心,负责事件循环、监控事件、管理事件、分发事件等等,相当于Reactor中的Synchronous Event Demultiplexer和Initiation Dispatcher。libev用watcher来管理处理各种事件,每类事件都有对应的watcher实现,比如IO事件的watcher是struct ev_io,信号事件的watcher是struct ev_signal。watcher相当于Event Handler和Concrete Event Handler。
watcher的“继承”与“封装”
libev不仅可以监控IO事件,也可以监控信号、定时器等等事件。为了化繁为简,libev将所有事件的公用部分抽象成一个结构体struct ev_watcher 。
/* shared by all watchers */
#define EV_WATCHER(type) \
int active; /* private */ \
int pending; /* private */ \
EV_DECL_PRIORITY /* private */ \
EV_COMMON /* rw */ \
EV_CB_DECLARE (type) /* private */
/* base class, nothing to see here unless you subclass */
typedef struct ev_watcher
{
EV_WATCHER (ev_watcher)
} ev_watcher;
struct ev_watcher衍生出其他所有的watcher,就像其他wacher的父类。虽然c语言中没有面对对象的机制,但是libev简单实现了一个结构体的“继承”机制。具体以struct ev_io为例,
#define EV_WATCHER_LIST(type) \
EV_WATCHER (type) \
struct ev_watcher_list *next; /* private */
/* base class, nothing to see here unless you subclass */
typedef struct ev_watcher_list
{
EV_WATCHER_LIST (ev_watcher_list)
} ev_watcher_list;
/* invoked when fd is either EV_READable or EV_WRITEable */
/* revent EV_READ, EV_WRITE */
typedef struct ev_io
{
EV_WATCHER_LIST (ev_io)
int fd; /* ro */
int events; /* ro */
} ev_io;
展开之后,struct ev_watcher 在空间布局上位于开头部分,因此可以使用struct ev_watcher 指针指向ev_io的实例,达到c++中的继承效果。fd和events是ev_io独有的变量,分别表示关注的文件描述符和事件。
typedef struct ev_io
{
int active;
int pending;
int priority; // 可以没有
void *data; // 给watcher附加自定义数据,可以没有
void (*cb)(EV_P_ struct type *w, int revents);
struct ev_watcher_list *next;
int fd;
int events;
} ev_io;
libev提供了很多的set方法,这也是注释中private的意思,告诉大家这里是私有变量,起到“封装”的作用,当然这只是“君子约定”。
#define ev_cb_(ev) (ev)->cb /* rw */
#define ev_cb(ev) (memmove (&ev_cb_ (ev), &((ev_watcher *)(ev))->cb, sizeof (ev_cb_ (ev))), (ev)->cb)
#if EV_MINPRI == EV_MAXPRI
# define ev_priority(ev) ((ev), EV_MINPRI)
# define ev_set_priority(ev,pri) ((ev), (pri))
#else
# define ev_priority(ev) (+(((ev_watcher *)(void *)(ev))->priority))
# define ev_set_priority(ev,pri) ( (ev_watcher *)(void *)(ev))->priority = (pri)
#endif
#ifndef ev_set_cb
/* memmove is used here to avoid strict aliasing violations, and hopefully is optimized out by any reasonable compiler */
# define ev_set_cb(ev,cb_) (ev_cb_ (ev) = (cb_), memmove (&((ev_watcher *)(ev))->cb, &ev_cb_ (ev), sizeof (ev_cb_ (ev))))
#endif
对于具体的watcher,比如ev_io 、ev_signal会有对应的ev_io_set、ev_signal_set方法来设置其中的特有变量。
EV_P、EV_P_和EV_A,EV_A_这四个宏
libev支持同时存在多个ev_loop。因此在声明函数时需要指明在哪个loop中操作,struct ev_loop *loop常常作为第一个参数,在调用函数时也需要传实参。像下面这样,
void ev_io_start (struct ev_loop *loop, ev_io *w); // 声明
ev_io_start (loop, &w->io); // 调用
但是如果只存在一个ev_loop,可以把这个ev_loop当作一个随处可访问的“全局变量”。在声明和调用函数的时候就不用加loop参数了。libev为了统一这两种情况,就使用了EV_P、EV_P_和EV_A,EV_A_这四个宏。
| 宏 | 含义 |
|---|---|
| EV_P | ev_loop parameter |
| EV_P_ | ev_loop parameter 多一个逗号 |
| EV_A | ev_loop argument |
| EV_A_ | ev_loop argument 多一个逗号 |
/* support multiple event loops? */
#if EV_MULTIPLICITY
struct ev_loop;
# define EV_P struct ev_loop *loop
# define EV_P_ EV_P,
# define EV_A loop
# define EV_A_ EV_A,
#else
# define EV_P void
# define EV_P_
# define EV_A
# define EV_A_
#endif
void ev_io_start (EV_P_ ev_io *w); // 声明
ev_io_start (EV_A_ &w->io); // 调用
libev也分别对这两种情况下的struct ev_loop做了各自的定义(其实没必要吧)
#if EV_MULTIPLICITY
struct ev_loop
{
ev_tstamp ev_rt_now;
#define ev_rt_now ((loop)->ev_rt_now)
#define VAR(name,decl) decl;
#include "ev_vars.h" // 这个头文件里定义了ev_loop所有的成员变量
#undef VAR
};
#include "ev_wrap.h" // 这个头文件里封装了对成员变量的访问
static struct ev_loop default_loop_struct;
EV_API_DECL struct ev_loop *ev_default_loop_ptr = 0; /* needs to be initialised to make it a definition despite extern */
#else
EV_API_DECL ev_tstamp ev_rt_now = EV_TS_CONST (0.); /* needs to be initialised to make it a definition despite extern */
#define VAR(name,decl) static decl;
#include "ev_vars.h" //将ev_loop的所有成员变量都当作全局变量
#undef VAR
static int ev_default_loop_ptr;
#endif
如果支持多个 event loop,那么 ev_default_loop_ptr 就是一个静态的 struct ev_loop 类型的结构体,其中包含了各种成员,比如 ev_tstamp ev_rt_now; int pendingpri; 等等。如果不支持多个 event loop,则上述的 struct ev_loop 结构就不存在,其成员都是以静态变量的形式进行定义,而 ev_default_loop_ptr 也只是一个 int 变量,用来表明 loop 是否已经初始化成功。
可以看到在EV_MULTIPLICITY没有启用的情况下,实际不存在ev_loop这个结构体。为了方便阅读源码,下面默认EV_MULTIPLICITY开启。
watcher简介
watcher是不透明的,需要用户来分配内存,注册感兴趣的事件。主要用来解答三个问题:
- 对哪些事件感兴趣
- 对哪里句柄感兴趣
- 当感兴趣的句柄上发生了感兴趣的事件,如何处理事件
ev_loop会在运行时监控所有watcher指定的句柄和事件,当某个句柄上发生某事件,会调用对应watcher的回调函数处理事件。
支持的事件
libev支持十几种事件,每种事件都有一个对应的watcher,分别是:
- 基础事件
- ev_io // IO事件监控
- ev_timer // 相对定时器
- ev_periodic // 绝对定时器
- ev_signal // 信号处理
- ev_child // 子进程状态监控
- ev_stat // 文件属性监控
- 对循环的hook
- ev_idle // event loop空闲时触发的事件
- ev_prepare // 在event loop循环之前调用的
- ev_check // 在event loop循环之后调用的
- ev_cleanup // 在event loop退出时触发
- 扩展事件
- ev_embed // 嵌入另一个后台循环
- ev_fork // fork事件
- ev_async // 线程间异步事件
前面说过,所有的watcher共用一个“父类”——struct ev_watcher 。
支持的event
/* eventmask, revents, events... */
enum {
EV_UNDEF = (int)0xFFFFFFFF, /* guaranteed to be invalid */
EV_NONE = 0x00, /* no events */
EV_READ = 0x01, /* ev_io detected read will not block */
EV_WRITE = 0x02, /* ev_io detected write will not block */
EV__IOFDSET = 0x80, /* internal use only */
EV_IO = EV_READ, /* alias for type-detection */
EV_TIMER = 0x00000100, /* timer timed out */
#if EV_COMPAT3
EV_TIMEOUT = EV_TIMER, /* pre 4.0 API compatibility */
#endif
EV_PERIODIC = 0x00000200, /* periodic timer timed out */
EV_SIGNAL = 0x00000400, /* signal was received */
EV_CHILD = 0x00000800, /* child/pid had status change */
EV_STAT = 0x00001000, /* stat data changed */
EV_IDLE = 0x00002000, /* event loop is idling */
EV_PREPARE = 0x00004000, /* event loop about to poll */
EV_CHECK = 0x00008000, /* event loop finished poll */
EV_EMBED = 0x00010000, /* embedded event loop needs sweep */
EV_FORK = 0x00020000, /* event loop resumed in child */
EV_CLEANUP = 0x00040000, /* event loop resumed in child */
EV_ASYNC = 0x00080000, /* async intra-loop signal */
EV_CUSTOM = 0x01000000, /* for use by user code */
EV_ERROR = (int)0x80000000 /* sent when an error occurs */
};
watcher的状态、对watcher的通用操作
watcher有四种状态:
- initialized,调用
ev_TYPE_init对 watcher 进行初始化之后。 - started/running/active, 调用
ev_TYPE_start之后的状态,并且开始等待事件。在这个状态下,除了特别提及的少数情况之外,watcher的内容不能被改变。 - pending, 当 watcher 是 active 并且一个让 watcher 感兴趣的事件到来,那么 watcher 进入 pending,事件等待被处理。除了特别提及的少数情况之外,watcher的内容不能被改变。
- stopped, 调用
ev_TYPE_stop之后。
ev_TYPE_init、ev_TYPE_start、ev_TYPE_stop,ev_TYPE_set是对watcher的操作,TYPE是libev支持的事件类型具体名称,比如io、signal等等。
所有的ev_TYPE_init都是宏定义,展开之后是先调用ev_init,再调用具体的ev_TYPE_set 。也就是说先初始化“父类”,在初始化具体的“子类”。
` ev_TYPE_start(EV_P_ ev_TYPE *w)`函数作用是将具体的ev_TYPE这个watcher加入到loop中。
ev_TYPE_stop(EV_P_ ev_TYPE *w)函数作用就是停止监控这个w这个watcher,从loop中删除。
由于ev_loop对于不同的watcher有着不同的组织方式,所以ev_TYPE_start函数在将具体的watcher绑定到loop中时,有着不同的操作逻辑。具体的 ev_TYPE_start和ev_TYPE_stop函数分析会放到ev_loop分析之后。
ev_loop
ev_loop是libev的核心,用来执行事件循环,组织各种各样的watcher,分发事件等等。ev_loop的成员变量都被放在“ev_vars.h”文件中,通过include展开。
创建
在EV_MULTIPLICITY宏启用的情况下,ev_loop有两种创建方式:
struct ev_loop *ev_default_loop (unsigned int flags)函数,创建默认的ev_loop,如果已经创建,则直接返回默认的ev_loop。这个函数不是线程安全的,不能在多线程中同时使用。会监控SIGCHLD信号。struct ev_loop *ev_loop_new (unsigned int flags)函数,这个函数是线程安全的,但是创建出来的ev_loop不能处理信号。
多线程中,libev的一种常见使用方式是为每个线程动态创建一个循环,并在 “主” 线程中使用默认的循环。
flags 参数可被用于指定特殊的行为或要使用的特定后端,且通常被指定为 0(或 EVFLAG_AUTO)。
/* flag bits for ev_default_loop and ev_loop_new */
enum {
/* the default */
EVFLAG_AUTO = 0x00000000U, /* not quite a mask */
/* flag bits */
EVFLAG_NOENV = 0x01000000U, /* do NOT consult environment */
EVFLAG_FORKCHECK = 0x02000000U, /* check for a fork in each iteration */
/* debugging/feature disable */
EVFLAG_NOINOTIFY = 0x00100000U, /* do not attempt to use inotify */
#if EV_COMPAT3
EVFLAG_NOSIGFD = 0, /* compatibility to pre-3.9 */
#endif
EVFLAG_SIGNALFD = 0x00200000U, /* attempt to use signalfd */
EVFLAG_NOSIGMASK = 0x00400000U, /* avoid modifying the signal mask */
EVFLAG_NOTIMERFD = 0x00800000U /* avoid creating a timerfd */
};
/* method bits to be ored together */
enum {
EVBACKEND_SELECT = 0x00000001U, /* available just about anywhere */
EVBACKEND_POLL = 0x00000002U, /* !win, !aix, broken on osx */
EVBACKEND_EPOLL = 0x00000004U, /* linux */
EVBACKEND_KQUEUE = 0x00000008U, /* bsd, broken on osx */
EVBACKEND_DEVPOLL = 0x00000010U, /* solaris 8 */ /* NYI */
EVBACKEND_PORT = 0x00000020U, /* solaris 10 */
EVBACKEND_LINUXAIO = 0x00000040U, /* linux AIO, 4.19+ */
EVBACKEND_IOURING = 0x00000080U, /* linux io_uring, 5.1+ */
EVBACKEND_ALL = 0x000000FFU, /* all known backends */
EVBACKEND_MASK = 0x0000FFFFU /* all future backends */
};
运行
void ev_run (EV_P_ int flags);
void ev_break (EV_P_ int how);
这里比较关注flags和how这两个参数。flags有下面这几个:
- 0.通常这是我们想要的,每次轮询在poll都会等待一段时间然后处理pending事件。
- EVRUN_NOWAIT.运行一次,在poll时候不会等待。这样效果相当于只是处理pending事件。
- EVRUN_ONCE.运行一次,但是在poll时候会等待,然后处理pending事件。
而how有下面这几个:
- EVBREAK_ONE.只是退出一次ev_run这个调用。通常来说使用这个就可以了。
- EVBREAK_ALL.退出所有的ev_run调用。这种情况存在于ev_run在pengding处理时候会递归调用。
ev_run函数
int ev_run (EV_P_ int flags)
{
...
EV_INVOKE_PENDING; /* invoke all pending watchers */ /* in case we recurse, ensure ordering stays nice and clean ,确保之前发生的事件都已经被处理*/
do
{
#if EV_VERIFY >= 2 // 当EV_VERIFY >= 2时,用于校验当前的结构体是否正常
ev_verify (EV_A);
#endif
#ifndef _WIN32
if (ecb_expect_false (curpid)) /* penalise the forking check even more */
if (ecb_expect_false (getpid () != curpid))
{ // 这个进程是新fork出来的,会执行ev_fork事件的回调
curpid = getpid ();
postfork = 1;
}
#endif
#if EV_FORK_ENABLE
/* we might have forked, so queue fork handlers */
if (ecb_expect_false (postfork))
if (forkcnt)
{
queue_events (EV_A_ (W *)forks, forkcnt, EV_FORK);
EV_INVOKE_PENDING;
}
#endif
#if EV_PREPARE_ENABLE
/* queue prepare watchers (and execute them) */
if (ecb_expect_false (preparecnt))
{
queue_events (EV_A_ (W *)prepares, preparecnt, EV_PREPARE);
EV_INVOKE_PENDING;
}
#endif
if (ecb_expect_false (loop_done))
break;
/* we might have forked, so reify kernel state if necessary */
if (ecb_expect_false (postfork))
loop_fork (EV_A);
/* 根据fdchanges数组调整有改变的文件描述符和事件 */
/* update fd-related kernel structures using backend_modify()*/
fd_reify (EV_A);
/* 计算poll应该阻塞的时间,这个时间与定时器超时时间有关 */
/* calculate blocking time */
{
......
#if EV_FEATURE_API
++loop_count;
#endif
assert ((loop_done = EVBREAK_RECURSE, 1)); /* assert for side effect */
/*调用IO复用函数,例如epoll_poll()*/
backend_poll (EV_A_ waittime);
assert ((loop_done = EVBREAK_CANCEL, 1)); /* assert for side effect */
pipe_write_wanted = 0; /* just an optimisation, no fence needed */
ECB_MEMORY_FENCE_ACQUIRE;
if (pipe_write_skipped)
{
assert (("libev: pipe_w not active, but pipe not written", ev_is_active (&pipe_w)));
ev_feed_event (EV_A_ &pipe_w, EV_CUSTOM);
}
/* update ev_rt_now, do magic */
time_update (EV_A_ waittime + sleeptime);
}
/* 如果栈顶元素的超时时间已经超过了当前时间,则将栈顶元素的监控器添加到
* loop->pendings中,并调整堆结构,接着判断栈顶元素是否仍超时,一致重复,
* 直到栈顶元素不再超时。
*/
/* queue pending timers and reschedule them */
timers_reify (EV_A); /* relative timers called last */
#if EV_PERIODIC_ENABLE
periodics_reify (EV_A); /* absolute timers called first */
#endif
#if EV_IDLE_ENABLE
/* queue idle watchers unless other events are pending */
idle_reify (EV_A);
#endif
#if EV_CHECK_ENABLE
/* queue check watchers, to be executed first */
if (ecb_expect_false (checkcnt))
queue_events (EV_A_ (W *)checks, checkcnt, EV_CHECK);
#endif
EV_INVOKE_PENDING;
} while (ecb_expect_true (
activecnt
&& !loop_done
&& !(flags & (EVRUN_ONCE | EVRUN_NOWAIT))
));
if (loop_done == EVBREAK_ONE)
loop_done = EVBREAK_CANCEL;
...
return activecnt;
}
总体流程:
- 触发那些已经pending的watchers,包括fork watcher和prepare watcher.
- 判断是否loop_done
- 用fd_reify调整有改变的fd和事件
- 计算出poll阻塞的等待时间,并且进行必要的sleep
- backend_poll开始轮询,并且整理好pending事件
- 使用timers_reify和periodics_reify调整相对定时器和绝对定时器的堆结构
- 触发那些已经pending的watchers,包括check watcher和io watcher
backend
ev_loop中有几个与backend相关的成员变量,
VARx(int, backend)
VARx(int, backend_fd)
VARx(ev_tstamp, backend_mintime) /* assumed typical timer resolution */
VAR (backend_modify, void (*backend_modify)(EV_P_ int fd, int oev, int nev))
VAR (backend_poll , void (*backend_poll)(EV_P_ ev_tstamp timeout))
backend指明此ev_loop使用的是哪种系统调用。可取值如下
enum {
EVBACKEND_SELECT = 0x00000001U, /* available just about anywhere */
EVBACKEND_POLL = 0x00000002U, /* !win, !aix, broken on osx */
EVBACKEND_EPOLL = 0x00000004U, /* linux */
EVBACKEND_KQUEUE = 0x00000008U, /* bsd, broken on osx */
EVBACKEND_DEVPOLL = 0x00000010U, /* solaris 8 */ /* NYI */
EVBACKEND_PORT = 0x00000020U, /* solaris 10 */
EVBACKEND_LINUXAIO = 0x00000040U, /* linux AIO, 4.19+ */
EVBACKEND_IOURING = 0x00000080U, /* linux io_uring, 5.1+ */
EVBACKEND_ALL = 0x000000FFU, /* all known backends */
EVBACKEND_MASK = 0x0000FFFFU /* all future backends */
};
#if EV_USE_EPOLL
if (!backend && (flags & EVBACKEND_EPOLL )) backend = epoll_init (EV_A_ flags);
#endif
创建ev_loop的两个函数中都会调用loop_init函数,loop_init函数会具体选择一种可用的系统调用来使用,同时进行相应的初始化,比如epoll_init、select_init。
在具体的初始化中,会设置backend_poll、backend_modify、backend_mintime三个成员变量的值。backend_poll和backend_modify是函数指针,void (*backend_poll)(EV_P_ ev_tstamp timeout),初始化后会指向具体的函数。比如epoll_init函数,
int epoll_init (EV_P_ int flags)
{
if ((backend_fd = epoll_epoll_create ()) < 0)
return 0;
backend_mintime = EV_TS_CONST (1e-3); /* epoll does sometimes return early, this is just to avoid the worst */
backend_modify = epoll_modify;
backend_poll = epoll_poll;
epoll_eventmax = 64; /* initial number of events receivable per poll */
epoll_events = (struct epoll_event *)ev_malloc (sizeof (struct epoll_event) * epoll_eventmax);
return EVBACKEND_EPOLL;
}
epoll_poll
当backend是EVBACKEND_EPOLL时,backend_poll函数指针指向epoll_poll函数。
static void epoll_poll (EV_P_ ev_tstamp timeout)
{
......
EV_RELEASE_CB;
eventcnt = epoll_wait (backend_fd, epoll_events, epoll_eventmax, EV_TS_TO_MSEC (timeout));
EV_ACQUIRE_CB;
......
for (i = 0; i < eventcnt; ++i)
{
struct epoll_event *ev = epoll_events + i;
int fd = (uint32_t)ev->data.u64; /* mask out the lower 32 bits */
int want = anfds [fd].events;
int got = (ev->events & (EPOLLOUT | EPOLLERR | EPOLLHUP) ? EV_WRITE : 0)
| (ev->events & (EPOLLIN | EPOLLERR | EPOLLHUP) ? EV_READ : 0);
......
fd_event (EV_A_ fd, got);
}
/* if the receive array was full, increase its size */
if (ecb_expect_false (eventcnt == epoll_eventmax))
{
ev_free (epoll_events);
epoll_eventmax = array_nextsize (sizeof (struct epoll_event), epoll_eventmax, epoll_eventmax + 1);
epoll_events = (struct epoll_event *)ev_malloc (sizeof (struct epoll_event) * epoll_eventmax);
}
......
}
epoll_poll主要就是:
- 调用epoll_wait等待事件到来
- fd_event解析事件的类型,然后按照优先级放到pendings里面
IO watcher分析
文件IO是网络编程的核心部分,这里对IO watcher进行简单分析。
#include <ev.h>
#include <stdio.h>
// every watcher type has its own typedef'd struct with the name ev_TYPE
ev_io stdin_watcher;
ev_timer timeout_watcher;
// all watcher callbacks have a similar signature
// this callback is called when data is readable on stdin
static void stdin_cb (EV_P_ ev_io *w, int revents)
{
puts ("stdin ready");
// for one-shot events, one must manually stop the watcher
// with its corresponding stop function.
ev_io_stop (EV_A_ w);
// this causes all nested ev_run's to stop iterating
ev_break (EV_A_ EVBREAK_ALL);
}
int main (void)
{
// use the default event loop unless you have special needs
// struct ev_loop *loop = EV_DEFAULT; /* OR ev_default_loop(0) */
EV_P = EV_DEFAULT;
// initialise an io watcher, then start it
// this one will watch for stdin to become readable
ev_io_init(&stdin_watcher, stdin_cb, /*STDIN_FILENO*/ 0, EV_READ);
ev_io_start(EV_A_ &stdin_watcher);
ev_loop(EV_A_ 0); /* now wait for events to arrive */
return 0;
}
anfds
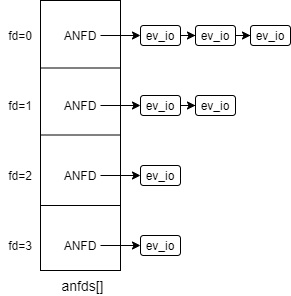
ev_loop使用anfds管理ev_io。anfds是一个元素为ANFD的数组,ANFD是一个链表,所以anfds是一个元素为链表的数组。
VARx(ANFD *, anfds)
VARx(int, anfdmax) // anfds数组所能容纳的最大元素个数
typedef ev_watcher_list *WL;
/* file descriptor info structure */
typedef struct
{
WL head;
unsigned char events; /* the events watched for */
unsigned char reify; /* flag set when this ANFD needs reification (EV_ANFD_REIFY, EV__IOFDSET) */
unsigned char emask; /* some backends store the actual kernel mask in here */
unsigned char eflags; /* flags field for use by backends */
#if EV_USE_EPOLL
unsigned int egen; /* generation counter to counter epoll bugs */
#endif
#if EV_SELECT_IS_WINSOCKET || EV_USE_IOCP
SOCKET handle;
#endif
#if EV_USE_IOCP
OVERLAPPED or, ow;
#endif
} ANFD;
既然ANFD是文件描述符信息结构体,怎么没在结构体里看到fd变量?这是因为fd已经作为anfds数组的下标,anfds[fd] = ANFD。这样可以快速找到与指定fd相关的所有watcher。综上,anfds结构如图:
ev_io_start 函数
void ev_io_start(EV_P_ ev_io *w) 函数是把w加入到loop中,源码如下:
void ev_io_start (EV_P_ ev_io *w) EV_NOEXCEPT
{
int fd = w->fd;
if (ecb_expect_false (ev_is_active (w)))
return;
assert (("libev: ev_io_start called with negative fd", fd >= 0));
assert (("libev: ev_io_start called with illegal event mask", !(w->events & ~(EV__IOFDSET | EV_READ | EV_WRITE))));
.......
ev_start (EV_A_ (W)w, 1);
array_needsize (ANFD, anfds, anfdmax, fd + 1, array_needsize_zerofill);
wlist_add (&anfds[fd].head, (WL)w);
/* common bug, apparently */
assert (("libev: ev_io_start called with corrupted watcher", ((WL)w)->next != (WL)w));
fd_change (EV_A_ fd, w->events & EV__IOFDSET | EV_ANFD_REIFY);
w->events &= ~EV__IOFDSET;
}
ev_io_start函数内容主要是以下几点:
ev_start (EV_A_ (W)w, 1);
void ev_start (EV_P_ W w, int active)
{
pri_adjust (EV_A_ w); // 调整w的优先级
w->active = active; // 设置w的状态的active
ev_ref (EV_A); // 递增loop的activecnt
}
- array_needsize对anfds数组扩容,wlist_add把w加入到anfds[fd]的链表中。
- fd_change函数递增fdchangecnt,将fd加入到fdchanges数组中。fdchanges数组用来指出哪些fd发生了变化,新增了watcher,删除了watcher等等。在下次事件循环之前,由fd_reify函数进行调整。
其他
array_needsize 宏
在Libev中,如果数组需要扩容,会使用array_needsize宏进行处理。比如,元素类型为ANFD的数组anfds,当前大小为anfdmax,要扩大为fd+1,新扩容的空间使用array_needsize_zerofill进行初始化:
array_needsize (ANFD, anfds, anfdmax, fd + 1, array_needsize_zerofill);
array_needsize宏的主要工作在array_realloc函数中,
static void *array_realloc (int elem, void *base, int *cur, int cnt)
{
*cur = array_nextsize (elem, *cur, cnt); // 计算最终的元素个数
return ev_realloc (base, elem * *cur); // 负责realloc
}
array_nextsize负责计算数组的最终元素个数,但它并没有直接返回fd+1,而是先把原来的数组大小翻倍,再将数组所占内存大小向上调整成MALLOC_ROUND的倍数,然后计算出实际的扩容后的数组元素个数。
/* find a suitable new size for the given array, */
/* hopefully by rounding to a nice-to-malloc size */
inline_size int array_nextsize (int elem, int cur, int cnt)
{
int ncur = cur + 1;
do
ncur <<= 1;
while (cnt > ncur);
/* if size is large, round to MALLOC_ROUND - 4 * longs to accommodate malloc overhead */
if (elem * ncur > MALLOC_ROUND - sizeof (void *) * 4)
{
ncur *= elem;
ncur = (ncur + elem + (MALLOC_ROUND - 1) + sizeof (void *) * 4) & ~(MALLOC_ROUND - 1);
ncur = ncur - sizeof (void *) * 4;
ncur /= elem;
}
return ncur;
}
pendings 数组
pendings是一个二维数组,按照优先级组织事件已经发生的watcher。ANPENDING结构记录了处于PENDING状态的监视器以及触发的事件。
VAR (pendings, ANPENDING *pendings [NUMPRI])
VAR (pendingmax, int pendingmax [NUMPRI]) //记录pendings数组第二维的容量
VAR (pendingcnt, int pendingcnt [NUMPRI]) // 记录pendings数组第二维的长度
VARx(int, pendingpri) /* highest priority currently pending */
/* stores the pending event set for a given watcher */
typedef struct
{
W w;
int events; /* the pending event set for the given watcher */
} ANPENDING;
ev_feed_event负责把已经被触发的w加入到pendings数组。
void ev_feed_event (EV_P_ void *w, int revents) EV_NOEXCEPT
{
W w_ = (W)w;
int pri = ABSPRI (w_);
if (ecb_expect_false (w_->pending))
// w_->pending不为0,该watcher已经处于PENDING状态
pendings [pri][w_->pending - 1].events |= revents;
else
{
w_->pending = ++pendingcnt [pri]; // pendingcnt[pri]记录了pendings[pri]目前的长度
array_needsize (ANPENDING, pendings [pri], pendingmax [pri], w_->pending, array_needsize_noinit);
pendings [pri][w_->pending - 1].w = w_;
pendings [pri][w_->pending - 1].events = revents;
}
pendingpri = NUMPRI - 1;
}
w_->pending的值:
- 该值为0表示该watcher第一次被激活,
- 不为0表示的是该watcher已经处于PENDING状态,而其具体的值,代表该watcher在pendings [pri]中的位置,也就是当前(loop->pendingcnt) [pri]的值。
EV_INVOKE_PENDING宏用来遍历pendings数组,调用所有已经触发事件的watcher的callback。
# define EV_INVOKE_PENDING ev_invoke_pending (EV_A)
void
ev_invoke_pending (EV_P)
{
pendingpri = NUMPRI;
do
{
--pendingpri;
/* pendingpri possibly gets modified in the inner loop */
while (pendingcnt [pendingpri])
{
ANPENDING *p = pendings [pendingpri] + --pendingcnt [pendingpri];
p->w->pending = 0;
EV_CB_INVOKE (p->w, p->events);
EV_FREQUENT_CHECK;
}
}
while (pendingpri);
}
参考
- libev 源码详解:https://jin-yang.github.io/post/linux-libev-source-code-details-introduce.html
- libev 详解:https://metacpan.org/pod/distribution/EV/libev/ev.pod
- libev 使用示例:https://jin-yang.github.io/post/linux-libev.html